|
|
@@ -7,7 +7,119 @@
|
|
|
[](https://crates.io/crates/stm32f1xx-hal)
|
|
|
[](https://docs.rs/stm32f1xx-hal)
|
|
|
|
|
|
-## Usage
|
|
|
+## Quick start guide
|
|
|
+
|
|
|
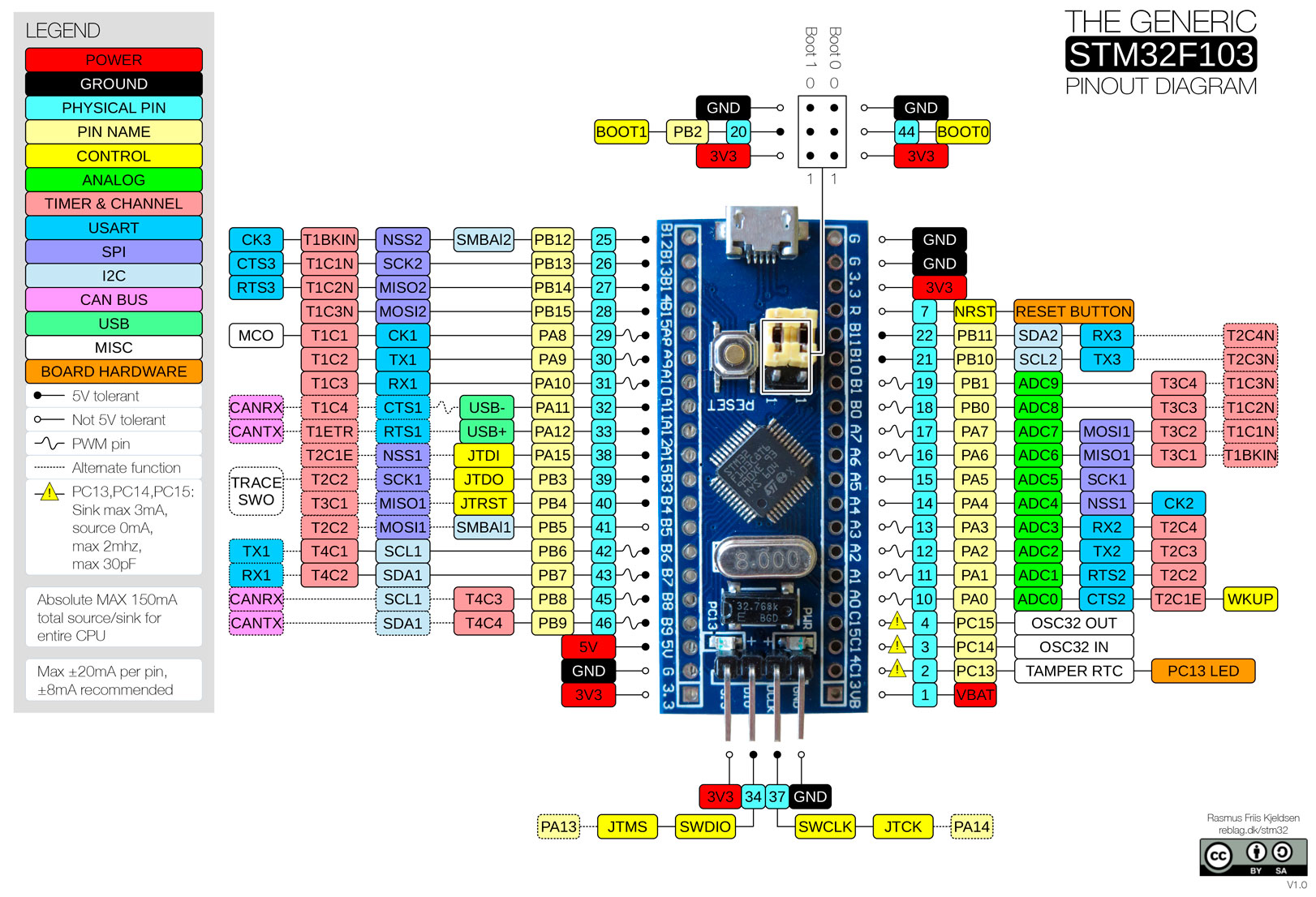
+Embedded Rust development requires a bit more setup than ordinary development.
|
|
|
+For this guide, we'll assume you're using a stm32 blue pill board (shown
|
|
|
+below), but if you have another f1 microcontroller, you should be able to adapt
|
|
|
+it.
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+You will also need a debug probe, for example an [stlink v3
|
|
|
+mini](https://www.st.com/en/development-tools/stlink-v3mini.html) for programming and debugging.
|
|
|
+(There are many different STLink probes out there, all of them _should_ work fine with this instructions given here, other JTAG or SWD debug probes will work as well but will need different software or configuration).
|
|
|
+
|
|
|
+### Installing software
|
|
|
+
|
|
|
+To program your microcontroller, you need to install:
|
|
|
+- [openocd](http://openocd.org/)
|
|
|
+- `arm-none-eabi-gdb`
|
|
|
+
|
|
|
+Finally, you need to install arm target support for the Rust compiler. To do
|
|
|
+so, run
|
|
|
+```
|
|
|
+rustup target install thumbv7m-none-eabi
|
|
|
+```
|
|
|
+
|
|
|
+
|
|
|
+### Setting up your project
|
|
|
+
|
|
|
+Create a new Rust project as you usually do with `cargo init`. The hello world
|
|
|
+of embedded development is usually to blink an LED and code to do so is
|
|
|
+available in [examples/blinky.rs](examples/blinky.rs). Copy that file to the
|
|
|
+`main.rs` of your project.
|
|
|
+
|
|
|
+You also need to add some dependencies to your `Cargo.toml`:
|
|
|
+
|
|
|
+```toml
|
|
|
+[dependencies]
|
|
|
+embedded-hal = "0.2.3"
|
|
|
+nb = "0.1.2"
|
|
|
+cortex-m = "0.6.2"
|
|
|
+cortex-m-rt = "0.6.11"
|
|
|
+# Panic behaviour, see https://crates.io/keywords/panic-impl for alternatives
|
|
|
+panic-halt = "0.2.0"
|
|
|
+
|
|
|
+[dependencies.stm32f1xx-hal]
|
|
|
+version = "0.5.2"
|
|
|
+features = ["rt", "stm32f103"]
|
|
|
+```
|
|
|
+
|
|
|
+If you build your project now, you should get a single error: `error: language
|
|
|
+item required, but not found: eh_personality`. This unhelpful error message
|
|
|
+is fixed by compiling for the right target.
|
|
|
+
|
|
|
+We also need to tell Rust how to link our executable, and how to lay out the
|
|
|
+result in memory. To accomplish all this, copy [.cargo/config](.cargo/config) and
|
|
|
+[memory.x](memory.x) from the stm32f1xx-hal repo to your project.
|
|
|
+
|
|
|
+```bash
|
|
|
+cargo build
|
|
|
+```
|
|
|
+
|
|
|
+If everything went well, your project should have built without errors.
|
|
|
+
|
|
|
+
|
|
|
+### Programming the microcontroller
|
|
|
+
|
|
|
+It is now time to actually run the code on the hardware. To do so plug your
|
|
|
+debug probe into the blue pill and start `openocd` using
|
|
|
+```bash
|
|
|
+openocd -f interface/stlink-v3.cfg -f target/stm32f1x.cfg
|
|
|
+```
|
|
|
+If you are not using an stlink V3, change the interface accordingly.
|
|
|
+For more information, see the [embeddonomicon].
|
|
|
+
|
|
|
+If all went well, it should detect your microcontroller and say `Info :
|
|
|
+stm32f1x.cpu: hardware has 6 breakpoints, 4 watchpoints`. Keep it running in
|
|
|
+the background.
|
|
|
+
|
|
|
+We will use gdb for uploading the compiled binary to the microcontroller and
|
|
|
+for debugging. Cargo will automatically start `gdb` thanks to the
|
|
|
+[.cargo/config](.cargo/config) you added earlier. `gdb` also needs to be told
|
|
|
+to connect to openocd which is done by copying [.gdbinit](.gdbinit) to the root
|
|
|
+of your project.
|
|
|
+
|
|
|
+You may also need to tell `gdb` that it is safe to load `.gdbinit` from the
|
|
|
+working directory.
|
|
|
+- Linux
|
|
|
+ ```bash
|
|
|
+ echo "set auto-load safe-path $(pwd)" >> ~/.gdbinit
|
|
|
+ ```
|
|
|
+- Windows
|
|
|
+ ```batch
|
|
|
+ echo set auto-load safe-path %CD% >> %USERPROFILE%\.gdbinit
|
|
|
+ ```
|
|
|
+
|
|
|
+If everything was successful, cargo should compile your project, start gdb,
|
|
|
+load your program and give you a prompt. If you type `continue` in the gdb
|
|
|
+prompt, your program should start and the green led on the blue pill should
|
|
|
+start blinking.
|
|
|
+
|
|
|
+
|
|
|
+### Going further
|
|
|
+
|
|
|
+From here on, you can start adding more code to your project to make it do
|
|
|
+something more interesting. For crate documentation, see
|
|
|
+[docs.rs/stm32f1xx-hal](https://docs.rs/stm32f1xx-hal). There are also a lot
|
|
|
+more [examples](examples) available. If something is unclear in the docs or
|
|
|
+examples, please, open an issue and we will try to improve it.
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+
|
|
|
+## Selecting a microcontroller
|
|
|
|
|
|
This crate supports multiple microcontrollers in the
|
|
|
stm32f1 family. Which specific microcontroller you want to build for has to be
|
|
|
@@ -31,7 +143,7 @@ device) but check the datasheet or CubeMX to be sure.
|
|
|
* `stm32f103`
|
|
|
|
|
|
|
|
|
-### Trying out the examples
|
|
|
+## Trying out the examples
|
|
|
|
|
|
You may need to give `cargo` permission to call `gdb` from the working directory.
|
|
|
- Linux
|
|
|
@@ -62,7 +174,7 @@ an stlink V2, use `stlink-v2.cfg`. For more information, see the
|
|
|
|
|
|
|
|
|
|
|
|
-### Using as a Dependency
|
|
|
+## Using as a Dependency
|
|
|
|
|
|
When using this crate as a dependency in your project, the microcontroller can
|
|
|
be specified as part of the `Cargo.toml` definition.
|
|
|
@@ -73,65 +185,6 @@ version = "0.5.2"
|
|
|
features = ["stm32f100", "rt"]
|
|
|
```
|
|
|
|
|
|
-## Blinky example
|
|
|
-
|
|
|
-The following example blinks an LED connected to pin PC13. For instructions on
|
|
|
-how set up a project and run the example, see the [documentation]. For more
|
|
|
-examples, see the [examples](examples) directory.
|
|
|
-
|
|
|
-[documentation]: https://docs.rs/stm32f1xx-hal/
|
|
|
-
|
|
|
-```rust
|
|
|
-#![no_std]
|
|
|
-#![no_main]
|
|
|
-
|
|
|
-extern crate panic_halt;
|
|
|
-
|
|
|
-use nb::block;
|
|
|
-
|
|
|
-use stm32f1xx_hal::{
|
|
|
- prelude::*,
|
|
|
- pac,
|
|
|
- timer::Timer,
|
|
|
-};
|
|
|
-use cortex_m_rt::entry;
|
|
|
-
|
|
|
-#[entry]
|
|
|
-fn main() -> ! {
|
|
|
- // Get access to the core peripherals from the cortex-m crate
|
|
|
- let cp = cortex_m::Peripherals::take().unwrap();
|
|
|
- // Get access to the device specific peripherals from the peripheral access crate
|
|
|
- let dp = pac::Peripherals::take().unwrap();
|
|
|
-
|
|
|
- // Take ownership over the raw flash and rcc devices and convert them into the corresponding
|
|
|
- // HAL structs
|
|
|
- let mut flash = dp.FLASH.constrain();
|
|
|
- let mut rcc = dp.RCC.constrain();
|
|
|
-
|
|
|
- // Freeze the configuration of all the clocks in the system and store
|
|
|
- // the frozen frequencies in `clocks`
|
|
|
- let clocks = rcc.cfgr.freeze(&mut flash.acr);
|
|
|
-
|
|
|
- // Acquire the GPIOC peripheral
|
|
|
- let mut gpioc = dp.GPIOC.split(&mut rcc.apb2);
|
|
|
-
|
|
|
- // Configure gpio C pin 13 as a push-pull output. The `crh` register is passed to the function
|
|
|
- // in order to configure the port. For pins 0-7, crl should be passed instead.
|
|
|
- let mut led = gpioc.pc13.into_push_pull_output(&mut gpioc.crh);
|
|
|
- // Configure the syst timer to trigger an update every second
|
|
|
- let mut timer = Timer::syst(cp.SYST, clocks)
|
|
|
- .start_count_down(1.hz());
|
|
|
-
|
|
|
- // Wait for the timer to trigger an update and change the state of the LED
|
|
|
- loop {
|
|
|
- block!(timer.wait()).unwrap();
|
|
|
- led.set_high().unwrap();
|
|
|
- block!(timer.wait()).unwrap();
|
|
|
- led.set_low().unwrap();
|
|
|
- }
|
|
|
-}
|
|
|
-```
|
|
|
-
|
|
|
## Documentation
|
|
|
|
|
|
The documentation can be found at [docs.rs](https://docs.rs/stm32f1xx-hal/).
|

 Frans Skarman
Frans Skarman
{kind=link}